振动控制原理及主要的设置参数
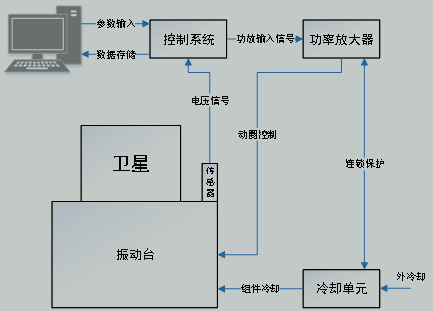
振动试验模拟装置主要有:振动台、控制器,其中控制器是振动模拟型号发生和实现振动的核心装置,
振动试验的流程见图:
振动试验主要用来考核结构承受动载力的能力及考核结构的设计是否合理。从试验的类型上来分,主要有:
1.正弦振动试验控制原理及关键参数
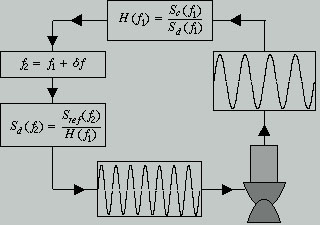
正弦振动试验时,一般通过扫描的方式进行,在试验频率范围内,扫描的频率点通过单点递增或者递减方式来实现。
正弦控制流程图见图:
振动试验的步骤主要包括如下几种:
控制传感器主要是用于获取控制点的响应,进而调整控制系统的输出,一般应粘贴在试验产品和试验夹具的对界面上。控制传感器的主要参数主要有灵敏度、频率范围、量程等。传感器粘贴完成后,在控制系统里设置控制传感器的灵敏度、耦合方式(电压、电荷、IEPE等),高通、低通等。
控制系统主要用来驱动振动台进而实现模拟产品的激励环境,参数主要包括:响应谱、压缩率、频率范围、扫描速率、数据获取方式、控制策划略等
- 响应谱
- 驱动调整速度
- 控制数据获取方式
- (a)峰值处理法
- (b)有效值处理法
- (c)平均值处理法
- (d)滤波法
- 控制策略
- (a)多点平均
- (b)多点取极大值
- (c)多点取极小值
- 扫描方式
- 扫描速率
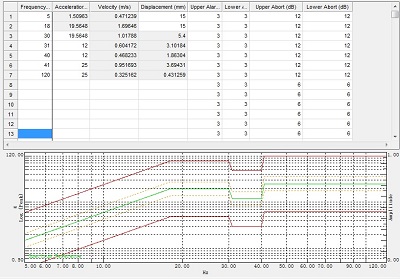
响应普主要用来设置驱动的输出量级(位移、速度、加速度等),是控制系统作用时的重要参数,该参数需要认真核对。设置时主要设置频率范围、位移、速度、加速度等值,实际中的曲线图如下:
正弦扫频振动试验控制系统输出的驱动信号,是实时调节的。当控制系统获得了振动台的响应,和响应谱不一致时,控制系统就会做出调整。调整有快慢,调整的越快,控制曲线越突兀,调整的越慢,控制曲线越平滑。不同的控制系统,对于驱动调整速度有不同的称呼,有的控制系统成为压缩率,有的成为阻尼因子。
信号从控制传感器传递到控制系统后,控制系统对其量化进而处理进成我们需要的数字信号。处理的方式主要有四种:
我们在获取控制振动台的控制信号时,一般在振动台上粘贴多个控制点,控制系统在处理这多个控制点返回的信号时,可以采用不同的方式,也就是控制策略。主要有:
正弦振动试验时,每个频率点之间的变化方式主要有线性和对数两种方式(linear,log)。
扫描速率主要是用来控制正弦振动试验的扫描快慢。线性扫描时,扫描速率用:\( Hz/sec \) 表示,对数扫描时,扫描速率用: \( oct/min \) 来表示。
对数扫描时,扫描时间用如下公式表示:
\( f(t) = f_0×2^{\frac{s×t}{60}} \)
\( f_0 \):起始频率;
\( f(t)\) :时刻 \( t \)的频率;
\( s \) :扫描速率,\( oct/min \)
系统自检的主要目的:
- (1).获得系统的背景噪声
- (2).获得系统的放大倍数
- (3).检查系统是否开环
- (4).获得系统的传递函数
- (5).粗略估计系统是否超量程
检查系统是否开环是正弦振动试验自检的主要目的。
正弦振动试验时,控制系统为了激励振动台,需要获取控制传感器的响应。传感器-测试导线-控制系统组成了控制回路,其中某一个环节有缺失,会导致整个回路不通,即开环。
以西门子LMS控制仪为例说明系统自检时如何检查开环。
LMS控制系统自检时的步骤见下图。
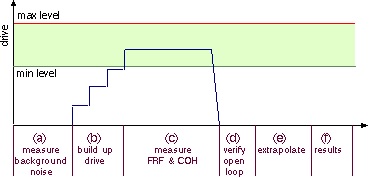
- a.测试系统的背景噪声。
- b.建立驱动信息
- c.测试系统传递函数和相干性
- d.检查通道是否开环
- 推断系统的最大输出电压
检查系统所有通道的背景噪声时,分为两个步骤:首先检查通道中是否有直流信号,如果通道中没有直流信号,第二步测试系统的背景噪声。
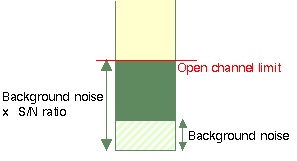
驱动以白噪声的形式的发出,驱动量级为参数里所设置的最大驱动电压的最低步数。驱动信号会不断增加,直至所有通道的信号等于或大于背景噪声与信噪比的乘积。在驱动信号大于所设置的最大电压时,通道的信号仍旧没有达到背景噪声和信噪比的乘积,则自检停止
一定数量的数据块会被测试,经处理后得到传递函数和相干性,这是自检过程中最耗费时间的步骤。
当系统所有通道测得的量级小于第一步获取的背景噪声值乘以信噪比时,该通道即为开环。
以下为LMS自检时关于开环的几个关键参数(点击即可展开显示)
1. Drive threshold for open loop check.
This defines the drive level below which the open loop check on the control channels will be disabled during notching. It can be used to perform tests where notching will make the drive so low that the control channels will appear open.
2.Selfcheck S/N ratio drive update
This represents the ratio between the measured control response level and the level of the background noise. The drive will be updated in steps until this signal to noise ratio is achieved. If this ratio cannot be obtained before the drive reaches the maximum level, then the selfcheck process stops.
3.Signal to noise ratio
This ratio is used to determine the limit for a channel to be considered as an open channel. If the measured signal on a channel at the final level used in the selfcheck, is less than this ratio times the background noise level, then the channel is regarded as an open channel. If this is a control channel, then the selfcheck has failed, and the source of the problem must be located. An open measurement channel is signalled as a warning.
4.Default range to open loop ratio
This parameter determines the level (ratio of control channels full range) below which the control loop is considered to be opened.
5.Max. background noise to full range ratio
This parameter determines the allowable background level (in %) on all activated channels. If the level is higher than the value indicated the selfcheck will stop with an error message.
系统自检通过,建立起传递函数后,可以进行正式试验。
2.随机振动试验控制原理及关键参数
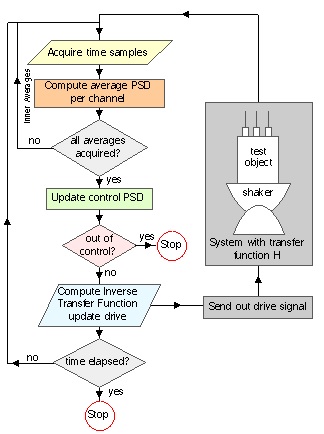
随机试验的主要流程如下图所示。
随机驱动算法要实现两个重要的目的:
1.令响应谱和目标谱一致。
2.时时判断结构处于安全的环境中,如果试件处于危险的环境中,系统会停止。
由上图可以看出,驱动算法中包括两个循环:内循环和外循环。
在内循环中,每个通道的PSD(功率谱密度函数)经过 \( n \) 次计算后,一个作用是用来得到系统的传递函数,另一个作用是判断系统的响应谱是否在参考谱的范围内,进而决定是否终止试验。外循环主要是判断控制时间是否达到要求。
控制算法主要有如下几个步骤:
- 获取控制传感器的时域数据
- 计算平均的PSD
- 更新控制PSD
- 检查控制状态(是否超差等)
- 计算传递函数的逆变换函数
- 发出驱动信号
各步骤主要参数及算法参照如下:
- 获取控制传感器的时域数据
- 频率下限: \( f_{min} \)
- 频率上限: \( f_{max} \)
- 频率分辨率: \( \Delta f \) .
- 采样频率: \( f_{s} \)
- 数据块数: \( BL \)
- 频谱线: \( N \)
- 计算平均的PSD
- 更新控制PSD
- 检查控制状态(是否超差等)
- 计算传递函数的逆变换函数
- 发出驱动信号
- 随机试验终止的根据
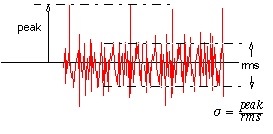
- Rrms终止,超过规定值,试验停止
- 终止线判定
- \( \sigma \) :
在这一步中,控制仪首先需要获取控制通道的时域信号,进行Fourier transformed 和 power spectral density 计算,这一步所用到的参数主要有:
其中频率下限、频率上限规定了试验频率范围,采样频率基于频率上限自动或人工设置,采样频率最小为频率上限的两倍,为了信号的完整,一般将采样频率设置为最大频率的2.56倍。
频率分辨率为相邻频率点的间隔。
上述几个参数的关系为(大概参考):
\( N = \frac{f_{max}-f_{min}}{\Delta f} \)
\( f_{max} = f_{s}/2 \) (分析频率不为最大频率)。
\( f_{max}/{\Delta f} \times 2 = {BL} \)
该步骤属于内循环,影响该计算的参数主要有:每循环的平均次数和控制策略。
每循环的平均次数
\( \overline{G_{i}} =\overline{G}_{i-1} +\frac{{G_i}-\overline{G}_{i-1}} {i} \)
\( i \) :平均次数
\( \overline{G}_{i-1}: 前一次的平均值。 \)
\( \overline{G}_{i} \) : 目前对额平均值
\( i \) 值越高,PSD越精确,但是其代价是花费越多的时间。
控制策略主要有:极大值控制、极小值控制、平均控制。
\( \overline{G}_{j+1} =\overline{G}_{j} +\frac{{G_{j+1}}-\overline{G}_{j}} {W} \)
\( \overline{G}_{j+1} \) : 当前平均后的PSD
\( \overline{G}_{j} \) :前一次平均获得的PSD
\( G_{j+1} \) :当前预估的控制PSD
\( W \) : 指数平均因子,表示前次平均PSD在当前计算中的权重,取值越大,前次平均PSD在计算中的权重越大,数值越小,表示当前PSD在计算中的权重越大,对于控制变化的响应越敏捷。
自由度(Degrees of freedom),表示的是统计学上的置信度概念,表示多少信号在Gaussian分布的范围内。
检查实际的控制谱是否在允差范围内,主要通过检查超出范围的频谱线或则总均方根值来检查,如果超出,停机。
\( \frac{1}{H}=\sqrt{\frac{G_{xx}}{G_{yy}}} \)
更新后的驱动为: \( |S_x|=\frac{|S_r|}{|H|} \)
将驱动经过D/A转换后输出到功放。
随机试验的几个重要参数: